Tässä artikkelissa kuvataan digitaalisen 0 mA – 20 mA virtaviestisyöttölaitteen suunnittelu- ja toteutusprosessi, joka kehitettiin toimimaan taajuusmuuttajan ja moottorin ohjauslaitteena. Laite mahdollistaa haluttujen vääntömomentti- (Nm) ja nopeusarvojen (rpm) asettamisen pyöritettävällä kiertokooderilla (encoder), jota kutsutaan myös enkooderiksi, ja arvot näytetään reaaliajassa LCD-näytöllä. Projektin tavoitteena oli luoda käyttäjäystävällinen ja luotettava laite moottorin ohjaukseen teollisissa sovelluksissa. Laitetta voidaan käyttää esimerkiksi Vaasan Technobothnian laboratoriossa laboraatioiden harjoituksissa. (Dang, 2024, s. 14.)
Taajuusmuuttajat voivat esimerkiksi ohjata oikosulkumoottorin nopeutta muuntamalla vaihtovirran tasavirraksi ja takaisin säädettäväksi vaihtovirraksi. Taajuusmuuttajat vähentävät energiankulutusta ja keräävät moottorin tilatietoja. Taajuusmuuttajat ovat keskeisiä laitteita teollisuudessa. (Hoyer, 2023.)
Artikkeli perustuu monilta osiltaan Yen Dangin opinnäytetyöhön, joka toteutettiin Vaasan ammattikorkeakoulussa vuonna 2024.
Vaadittavat ominaisuudet ja laitteen lohkokaavio
Virtaviestin säätöalue on 0 mA – 20 mA, ja arvot säädetään pyöritettävällä enkooderilla. LCD-näytön tulee näyttää reaaliaikaiset arvot, ja vasteajan on oltava nopea. Käyttöliittymä koostuu LCD-näytöstä ja enkooderista, ja laitteessa on kaksi virtasilmukkalähtöä taajuusmuuttajan analogiatuloille. Ohjelmiston on hallittava vääntömomentin ja nopeuden asetusarvoja sekä tunnistettava virtasilmukan vikatilanne eli esimerkiksi katkos (Dang, 2024, s. 10.)
Suorituskykyvaatimuksiin kuuluvat virran säätöalue 0 mA – 20 mA, jossa resoluutio tulee olla 0,02 mA. Eri ohjelmaversioilla voidaan tarvittaessa näyttää laitteen näytöllä vääntömomentti 0 Nm – 50 Nm, jolloin resoluutio 0,05 Nm ja moottorin pyörimisnopeus 0 rpm – 3000 rpm, jolloin resoluutio 3 rpm tai arvot voidaan näyttää prosentteina 0 % – 100 %, jolloin resoluutio 0,1 %. Laitteen on oltava helppokäyttöinen, elektroniikka tulee olla suojattu sulakkeella ja laite tulee olla helposti huollettavissa. Laitteen tulee olla yhteensopiva eri taajuusmuuttajien analogiatulojen kanssa ja toimia 0 °C – +50 °C lämpötiloissa. Virtasilmukan kaapelin resistanssi voi olla enintään 500 Ω. Laitteen ohjelmisto kirjoitetaan C-kielellä (Dang, 2024, s. 11–12.)
Laitteen kehitys jaettiin kolmeen vaiheeseen: piirisuunnittelu ja prototyypin kehittäminen, mikro-ohjaimen ohjelmiston kehittäminen sekä painettujen piirilevyjen (PCB) suunnittelu. Laitteessa on ominaisuus nopeaan ja hitaaseen ohje-arvojen säätöön.
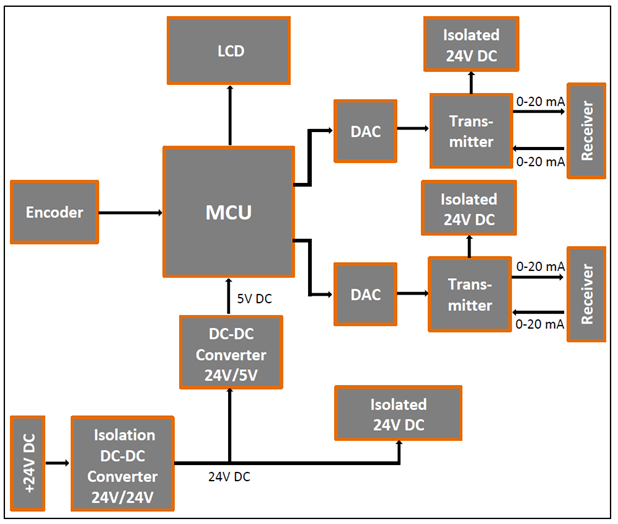
Kuvassa 1 on laitteen yksinkertaistettu lohkokaavio. Lohkot ovat seuraavat: encoder on käsin pyöritettävä enkooderi, jolla voidaan säätää laitteen ohjelmistossa haluttuja muuttujien arvoja ja näyttää ne laitteen LCD-näytöllä laitteen käyttäjälle. MCU-lohko sisältää mikro-ohjaimen, jolla voidaan ohjata kaikki siihen liitettyjä oheislaitteita kuten ulkoisia DA-muuntimia eli DAC-lohkoja. DA-muuntimet ohjaavat transmitter eli lähetinosaa, joka muuntaa DA-muuntimen lähtöjännitteen virraksi 0 mA – 20 mA ja toimii siten jännite / virta muuntimena. Receiver osa on käytännössä vastaanottavan laitteen päätevastus, jonka arvo voi olla esimerkiksi 250 Ω. Teholähdeosa isolation DC-DC converter 24V/24V on laitteen teholähde ja se on galvaanisesti eristetty, jotta voidaan välttyä syöttöjännitteessä mahdollisesti esiintyviltä häiriöiltä. Lisäksi laitteessa on DC-DC converter 24V/5V, joka muuntaa 24V tasajännitteen 5V tasolle, joka sopii laitteen digitaalielektroniikalle.
Laitteen elektroniikan suunnittelu
Enkooderi (Encoder, PEC11R-4220F-S0024) sisältää kaksi pulssilähtöä ja pulssien lukumäärä yhdestä pulssilähdöstä on 24 pulssia, kun akselia pyöritetään 360°. Nämä kaksi pulssilähdön pulssia ilmaisevat pyörimissuunnan pulssien vaihesiirtoon perustuen ja laiteen mikro-ohjain lukee ulkoisten keskeytystulojen kautta enkooderia ja muuntaa enkooderin digitaaliset syötteet virtaviestiksi DA-muuntimien (MCP4725) ja transistorien (BC547) avulla. I2C-väyläinen 16 merkkinen ja kaksi rivinen LCD-näyttö tarjoaa reaaliaikaisen näkymän käyttäjälle (Dang, 2024, s. 24-25.)
Laitteessa on käytetty kahta DFRobot Gravity 12-bittistä moduulia (DFR0552), joissa MCP4725 DA-muunnin. DA-muuntimien referenssijännite generoitiin TL431 referenssijännitepiirillä DA-muuntimien lähtöjännitteiden vakauden varmistamiseksi (Dang, 2024, s. 24.)
Virtasilmukka koostuu lähetin- ja takaisinkytkentäpiireistä. Lähetinpiirissä LM324-operaatiovahvistin ja BC547-transistori muuntavat DA-muuntimen syöttämän jännitteen virraksi 0 mA – 20 mA. Takaisinkytkentäpiirissä on 250 Ω vastus ja alipäästösuodatin, jotta Arduino Nano kehitysalustan mikro-ohjaimen ATmega328 AD-muuntimelle ei pääse suuritaajuisia häiriöitä viestisilmukasta ja lisäksi AD-muunnin on suojattu transienttijännitteiltä P6KE43 TVS-diodeilla ja staattisilta sähkönpurkauksilta vastuksilla ja kahdella 1N4148 diodilla (Dang, 2024, s. 24.)
Ohjelmiston suunnittelu
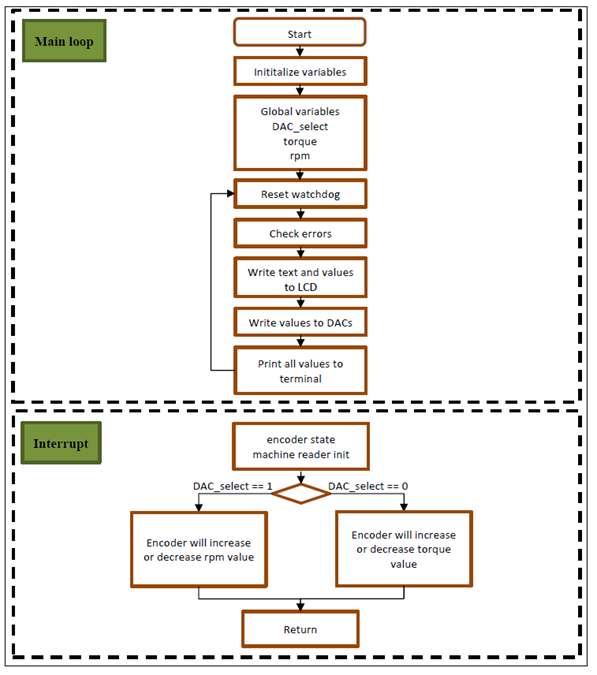
Ohjelma kirjoitettiin C-kielellä. Kuvassa 2 on ohjelman yksinkertaistettu lohkokaavio. Ohjelmassa on otettu käyttöön vahtikoira-ajastin (watchdog), joka varmistaa ohjelman normaalin toiminnan ja estää sen jumittumisen. Jos vahtikoira-ajastinta ei nollata säännöllisin väliajoin, se käynnistää mikro-ohjaimen uudelleen. Ikuisessa silmukassa nollataan vahtikoira-ajastin (Reset watchdog), tarkistetaan silmukkavirran virrankulku (check errors), kirjoitetaan arvot LCD-näytölle (Write text and values to LCD), kirjoitetaan arvot DA-muuntimille (Write values to DACs) ja testausvaiheessa tulostetaan arvot PC-koneen terminaaliin (Print all values to terminal). Keskeytysohjelmassa (Interrupt) luetaan enkooderin pyörimisestä tuotetetut pulssit ja muutetaan näiden pulssien perusteella globaalien muuttujien kuten esimerkiksi momentin tai pyörimisnopeuden arvoja, jotka näytetään LCD-näytöllä. Enkooderin painonappia painamalla voidaan vaihtaan DAC_select arvoa, joten voidaan säätää, joko momenttia tai pyörimisnopeuden arvoa eli virtaviestiarvoa (Current Loop Device testing 2024).
Piirilevyjen suunnittelu ja valmistus
Kuten kuvasta 3 nähdään, niin laite on suunniteltu erittäin robustisti. Galvaanisesti erotettu DC-DC teholähde SD-25B-24 oikealla ylhäällä ja teholähteen suojaukset on sijoitettu omalle piirikortille vasemmalla ylhäällä. Sekä teholähde, että syöttöjännitteessä oleva häiriösuodatin ovat tarkoituksellisesti reilusti ylimitoitettuja tässä prototyypissä. Pääpiirikortti on KiCAD-ohjelmalla piirretty ja ensimmäisen prototyypin piirikortti valmistettu Vaasan Technobothnian laboratiossa.

Testaus
Virtaviestilaitetta testattiin useasti Vaasan Technobothnian laboratioriossa. Kuvassa 4 ensimmäinen prototyyppi testauksessa, jossa näkyy silmukkavirrat ja päätevastuksien jännitteet, kun päätevastusten arvot ovat 250 Ω.

Kuvassa 5 laitetta testattiin taajuusmuuttaja + moottori yhdistelmällä ja moottorin pyörimisnopeus voitiin nähdä taajuusmuuttajavalmistaja Vaconin NCDrive-ohjelmistosta. Virtaviestisyöttölaite kytkettiin taajuusmuuttajan analogiatuloihin 0 mA – 20 mA. Testauksessa havaittiin virtaviestisyöttölaitteen LCD-näytössä häiriöitä, jotka johtuivat taajuusmuuttajan suojaamattomasta moottorikaapelista, mutta myöhemmin häiriöt saatiin poistettua parantamalla virtaviestisyöttölaitteen kaapelien suojausta (Current Loop Device testing with frequency converter 2024).

Johtopäätökset
Kaikki laitteen vaatimukset saatiin toteutettua ja laitteita valmistettiin 10 kpl ja kaikki laitteet läpäisivät funktionaaliset testaukset laboratoriossa.
- Halutut vääntömomenttiarvot vaihtelevat välillä 0 – 50 Nm, ja vastaavat virta-arvot mitattiin välillä 0 – 20 mA.
- Halutut nopeusarvot vaihtelevat välillä 0 – 3000 rpm, ja vastaavat virta-arvot mitattiin välillä 0 – 20 mA.
- Lisäksi testattiin myöhemmin näytön näyttämällä 0 – 100 %, ja vastaavat virta-arvot mitattiin välillä 0 – 20 mA
Projekti kohtasi useita haasteita johtuen taajuusmuuttajan ulkoisista häiriöistä ja sisäisestä kapasitiivisesta kytkeytymisestä, jotka ilmenivät laitteen sisäisen digitaalisen I2C-väylän ja analogiasignaalien välillä. Nämä häiriöongelmat ratkaistiin parantamalla piirilevysuunnitelmaa sekä toteuttamalla asianmukaiset suojaus- ja maadoitustekniikat laitteen sisäisessä johdotuksessa. Ulkoisten suojattujen kaapeleiden käyttö auttoi minimoimaan taajuusmuuttajan aiheuttamat ulkoiset häiriöt. Näiden ongelmien poistamisen jälkeen valmis virtaviestisyöttölaite toimi asianmukaisesti.
Yhteenvetona voidaan todeta, että projekti saavutti tavoitteensa luomalla luotettavan virtaviestisyöttölaitteen. Laitteen suorituskyvyn parantamiseksi suosittelemme kuitenkin vahvasti EMC-testausta ja sääkaappitestausta. Nämä testaukset varmistavat laitteen pitkän aikavälin toimintavakauden ja hallitsevat mahdollisia ongelmia, joita voi ilmetä pitkäaikaisessa käytössä ja erilaisissa ympäristöissä. (Dang, 2024, s. 46–47.)
